ship inertial navigation
jianting guanxing daohang
利用舰艇运动时的惯性力测得加速度而实现舰艇定位的自主式高精度导航技术。简称舰艇惯导。可自动连续地在全球范围内提供航向、首向、航迹向、实际(对地)航速、航程、纵横摇角和位置坐标等多种导航数据。舰艇惯性导航具有连续工作时间长,灵敏度和精度均较高等特点,是大型水面舰艇和核动力潜艇等的重要导航方式。
舰艇惯性导航设备有多种结构形式。通常由指北平台、加速度计和专用计算机等构成(见图)。另还有电源装置和一些外围设备等。图中P为指北平台,一般由3个互相垂直安装的陀螺控制,模拟地平坐标系,是精确的方位和水平基准,可提供舰艇航向和纵横摇角的三度姿态参数,以稳定各种武器和雷达天线等的瞄向角。两个加速度计AN及AE分别按南北和东西方向装在指北平台上,敏感惯性力以测取这两个方向上舰艇的加速度aN及aE,并输入计算机进行两次积分及南北、东西方向矢量合成等运算后,能输出及显示含有风流影响在内的舰艇对地航速矢量V和航程S,再结合事先装入的起航点经纬度λ0φ0,连续自动地推算并显示舰艇实时地理坐标经度λ及纬度φ。外围设备包括打印机及遥显示器等,可根据需要装配。惯性导航设备在启动时必须先完成平台的初始对准,即利用外界参考信息和平台自身的能力使之准确地水平指北,通常需1~2小时。为保证工作精度,必须精密设计平台的构造参数,保持平台的自由振荡周期为84.4分钟(舒勒周期),以避免舰艇航行机动对平台工作的影响,使它总能精确地保持在水平指北方向上。
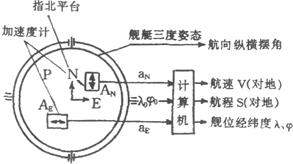
惯性导航基本构成及原理图
舰艇惯性导航的优点:不依赖外界物标和信息,不向外发射任何电、光和声波,因而不受任何外界干扰,能在包括两极在内的全球水面及水下海域、全天候、自主、连续、隐蔽地工作,特别适合长期在水下隐蔽活动和发射弹道导弹的核动力潜艇的导航需要。主要缺点是定位误差随时间积累,须借助其他导航手段定期对其重调校正;设备精密,价格昂贵;使用维护都要较高的技术水平。20世纪80年代初,舰艇惯性导航的定位误差已在1海里/天左右;航向误差1角分以内;水平误差则在角秒级。
惯性导航首次实用是在1942年,装在由德国研制的V-2火箭上完成自动按预定航线飞行的任务。1957年10月苏联发射的第一颗人造地球卫星,开始把惯导技术用于航天飞行。1958年8月美国核动力潜艇“鹦鹉螺”号首次使用舰艇惯导完成了在冰下穿越北极的航行。从60年代开始,舰艇上有了将惯导与其他导航手段相组合的多种综合导航设备,可互相取长补短,进一步提高导航精度和增强生命力,如惯性-奥米伽、天文-惯性和卫星-惯性及以惯导为中心的大型综合导航系统等。70年代后,在一些新型平台罗经中增加了简易惯导方式,进一步扩大了舰艇惯导的装备使用范围。中国研制的舰艇惯导设备于70年代开始装备舰艇。新型惯导设备将改进或采用新型陀螺仪、加速度计和电子元件,进一步提高工作精度和可靠性,延长重调校正周期和降低造价等。